
机器人本体的特点讲解
2021-07-26(4375)次浏览
机器人本体结构是机体结构和机械传动系统,也是机器人的支承基础和执行机构。机器人本体基本结构由以下五部分组成:1、传动部件;2、机身及行走机构;3、臂部;4、腕部;5、手部。

工业机器人本体
工业机器人具体组成详解:
1.机械本体:机器人的机械本体机构基本上分为两大类,一类是操作本体机构,它类似人的手臂和手腕,另一类为移动型本体结构,主要实现移动功能,主流的工业机器人本体制造商有发那科、ABB、安川、库卡等。
2. 驱动伺服单元:伺服单元的作用是使驱动单元驱动关节并带动负载按预定的轨迹运动。已广泛采用的驱动方式有:液压伺服驱动、电机伺服驱动,气动伺服驱动,市场上主流的伺服电机厂家有安川、多摩川、拉法特、三菱、富士、松下。
3. 数控系统:各关节伺服驱动的指令值由主计算机计算后,在各采样周期给出。机器人通常采用主计算机与关节驱动伺服计算机两级计算机控制,计算机控制系统包括电机驱动软件和轨迹控制软件,其中轨迹控制软件奥地利KEBA公司设计的比较好。
4. 传感系统:除了关节伺服驱动系统的位置传感器(称作内部传感器)外,还需要搭配视觉、力觉、触觉、接近等多种类型的传感器(称作外部传感器)。
5. 输出/输入系统接口:为了与周边系统及相应操作进行联机与应答,会开放各种通信接口和人机通信装置。
工业机器人本体厂商主要生产机器人,工作内容包括生产机器人关键零部件、控制算法和设计开发环境等;系统集成商的工作是工艺的把握,资源的整合,是把生产出来的机器人与视觉传感器、机床设备等等进行连接和调试,这样一台机器人才能正式投入使用。
工业机器人本体的发展需要系统集成商的推动,而系统集成商集成也需要本体厂商的支持。对本体厂商来说,机器人的应用问题也关系着本体企业的发展壮大,所以与系统集成商的配合则显得尤为重要。
工业机器人本体生产商的利润点是产品的销售利润,关注点在产品上,主要是把产品本身质量做好,不考虑系统制作的问题。
最新资讯
-

新能源储能逆变器智能生产线主要结构组成
新能源储能逆变器智能生产线的主要结构组成通常涵盖以下几个方面...
-

松乐智能装备:助力新能源逆变器市场再创佳绩
松乐智能装备(广东)有限公司,这家成立于2015年的国家级高新技...
-

储能逆变器智能生产线的技术特点
储能逆变器智能生产线的技术特点主要体现在以下几个方面:
-
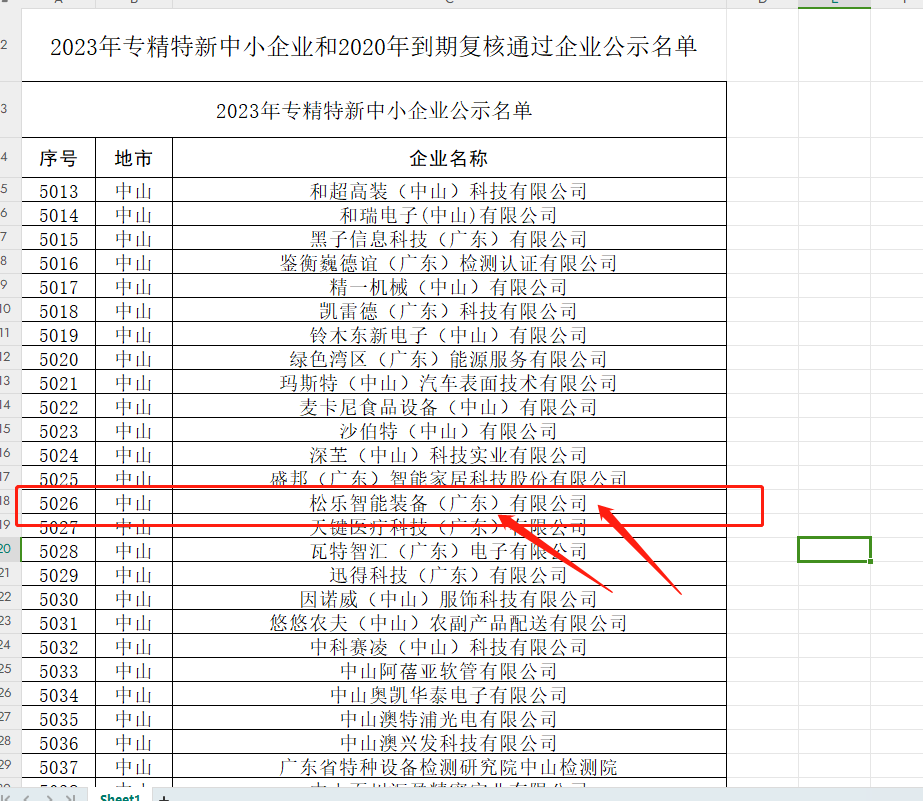
热烈祝贺松乐智能装备公司荣获广东省专精特新企业认定
近日,广东省工业和信息化厅公示了2023年专精特新中小企业和2020...
4000-599-111
服务热线:4000-599-111
联系电话:13682445197
公司传真: 0760-85286527
公司邮箱:hubao@sz-gsd.com
公司地址:翠亨新区香山大道34号西湾国家重大仪器科学园2号501




 4000-599-111
4000-599-111