
码垛机器人抓手设计要素
2021-12-10(1715)次浏览
码垛机器人抓手也叫末端执行器、夹具、机械抓手,是码垛机器人的重要组成部分,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式。松乐智能这里分享一下码垛机器人抓手设计要素。
码垛机器人工作视频
码垛机器人抓手可分为夹钳式取料抓手,吸盘式取料手爪,访真多手指抓手,夹板式托持型抓手等。根据产品的包装是纸箱类,编织袋类,桶装类,散装类,重量多少,单个面积大小等等,由此分为瓶装用手爪,夹钳式手爪,百叶窗式手爪,吸盘式手爪,瓶装和码垛式手爪,夹紧放置隔板式手爪,抓手式手爪和桶装式手爪等。
1.码垛机器人的抓手设计需要从多方面来考虑,比如:抓手工作目标的重量、大小及材质对于不同对象的工件选择不同的手爪,如板料类工件可采用真空吸附式;对于导磁性介质可采用磁力吸盘;对于PVC料袋等采用夹钳式。
2.码垛机器人手爪前端送料的输送带的结构,对于料袋抓取的辊子输送带一般有国标,需要采用标准的接口,而对于皮带输送带,就要考虑怎样来实现。
3.机器人抓手的经济工作方式,采用电动、气动、液压等作为动力来源,涉及的结构及其制造、使用和维护成本不一样,利用现场环境可提供的动力能够降低生产制造成本。
4.码垛机器人机型的选择,机器人Z大负载能力和工作半径,机器人的转动惯量,机器人的价格,来考虑抓手的设计。
5码垛机器人手抓目标的重量、大小及材质对于不同对象的工件选择不同的手爪,如板料
6码垛机器人运动末端工件放置的空间布局,抓手是否适用生产环境。
7.所抓取物料决定抓手的种类,如袋装物料通常用抓取式,箱装物料用哦夹板式或者真空吸盘式抓手,板材通常用吸盘式抓手等。
码垛机器人抓手的选择一般根据生产现场环境来决定的,不同的工作需求,对抓手的设计要求不同。码垛机器人的普及使用既缓减了劳动强度,又降低了人工生产成本,为企业的发展带来诸多优势。
最新资讯
-

新能源储能逆变器智能生产线主要结构组成
新能源储能逆变器智能生产线的主要结构组成通常涵盖以下几个方面...
-

松乐智能装备:助力新能源逆变器市场再创佳绩
松乐智能装备(广东)有限公司,这家成立于2015年的国家级高新技...
-

储能逆变器智能生产线的技术特点
储能逆变器智能生产线的技术特点主要体现在以下几个方面:
-
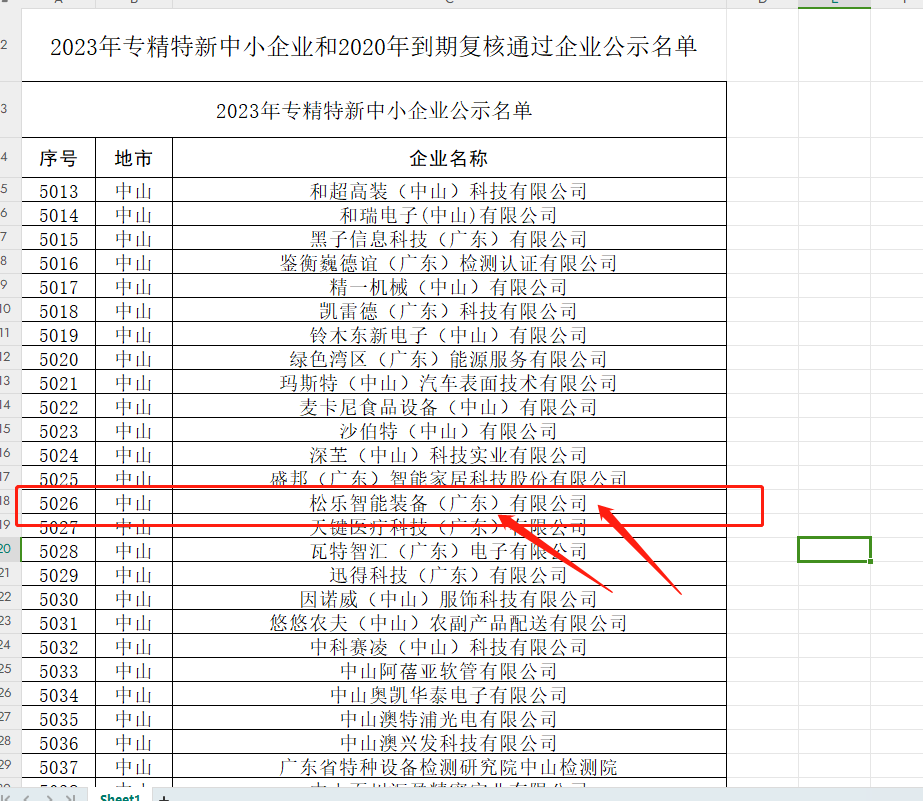
热烈祝贺松乐智能装备公司荣获广东省专精特新企业认定
近日,广东省工业和信息化厅公示了2023年专精特新中小企业和2020...
4000-599-111
服务热线:4000-599-111
联系电话:13682445197
公司传真: 0760-85286527
公司邮箱:hubao@sz-gsd.com
公司地址:翠亨新区香山大道34号西湾国家重大仪器科学园2号501




 4000-599-111
4000-599-111