
自动打磨机器人如何打磨复杂图形结构
2021-02-08(4612)次浏览
汽轮机缸体是铸造成型得到的复杂结构的原始产品,在浇铸过程中不可避免地存在着缺陷,成型后必须要对其进行无损探伤探伤工艺前,要求用自动打磨机机器人打磨除去表面夹渣及氧化层、浅层裂纹等缺陷,以保证探伤结果的正确性。三十万千瓦汽轮机缸体其大尺寸为82X40X26m.需打磨的内外表面近1m.打磨1作量很大。缸体形状复杂,包括各种标准曲面(圆柱面、圆锥面平面)和大量的空间自由曲面,而且这些曲面的轴线或母线处于空间的各种方位。

打磨机器人
缸体内外表面都有许多铸造工艺结构和零件功能结构使得表面的各种曲面的边界各种各样,加之缸体产品系列化,大小不同,形状各异,要求自动打磨机器人和控制软件要有柔性和自适应能力,这对系统的数控编程和控制都是个难题,面对如此复杂的曲面形状,根据打磨机器人本体的自由度设置和结构的需要,如何方便进行数控编程呢?经过松健机器人深入的分析研究,终的处理方案是:
一、对那些无法用数学方程描述的空间曲面,先是通过自动打磨机器人对产品的示教采样,得到型值点坐标再经曲面拟合和线性插值,用线性插补控制磨头进给,以砂轮的二维折线运动,个环面个环面地来逼近三维自由曲面。
二、对于那些可以由数学方程式包括隐函数式、极坐标式、参数式描述的空间自由曲面,则采用正负法来直接插补加,既省去了示教采样这个繁琐的人L操作步骤,提高打磨效率,又省去了曲面拟合中间插值等大量计算工作量,并克服由此产生的拟合误差。
三、自动打磨机器人对于大约30余种不同形状不同方位不同边界的标准曲面(平面、圆柱面、圆锥面)经图形线性变换以几种统的数学方案数据格式来精确地处理它们。本来应用正负法是完全可以用种控制过程产生包括这些标准曲面曲线的任意曲线运动的,只是因为正负法插补,要求输入曲线的方程式,数控编程时,输入稍大于经图形变换以后用统数据格式来编程的输入工作量;加之缸体表面的标准曲面占了大部分这部分的数控编程应越简单越好,所以对这些标准曲面作了单的处理。
四、由于自动打磨机器人的打磨轨迹控制点是偏离工件表面的,要经究两次线性和非线性变换才能得到控制点坐标,首先控点轨迹应是工件表面曲线的等距轨迹线,此外,由于整体结构决定了控制点并不在磨削点所在处曲面的法线上还要经过适当的变换才能得到控制点的坐标值。
最新资讯
-

新能源储能逆变器智能生产线主要结构组成
新能源储能逆变器智能生产线的主要结构组成通常涵盖以下几个方面...
-

松乐智能装备:助力新能源逆变器市场再创佳绩
松乐智能装备(广东)有限公司,这家成立于2015年的国家级高新技...
-

储能逆变器智能生产线的技术特点
储能逆变器智能生产线的技术特点主要体现在以下几个方面:
-
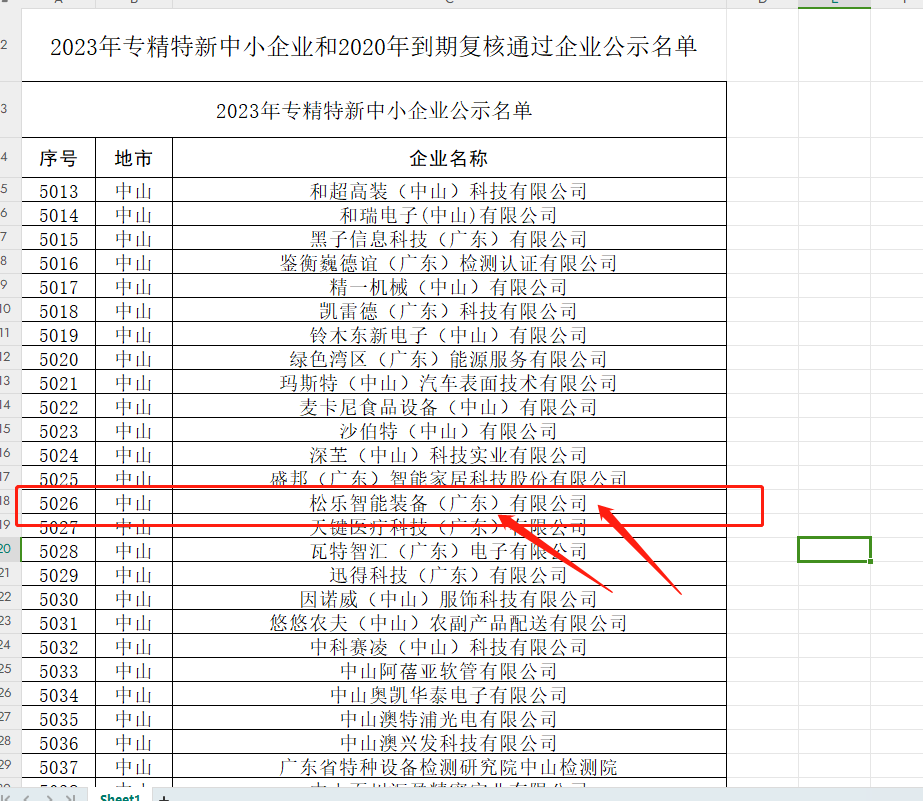
热烈祝贺松乐智能装备公司荣获广东省专精特新企业认定
近日,广东省工业和信息化厅公示了2023年专精特新中小企业和2020...
4000-599-111
服务热线:4000-599-111
联系电话:13682445197
公司传真: 0760-85286527
公司邮箱:hubao@sz-gsd.com
公司地址:翠亨新区香山大道34号西湾国家重大仪器科学园2号501




 4000-599-111
4000-599-111